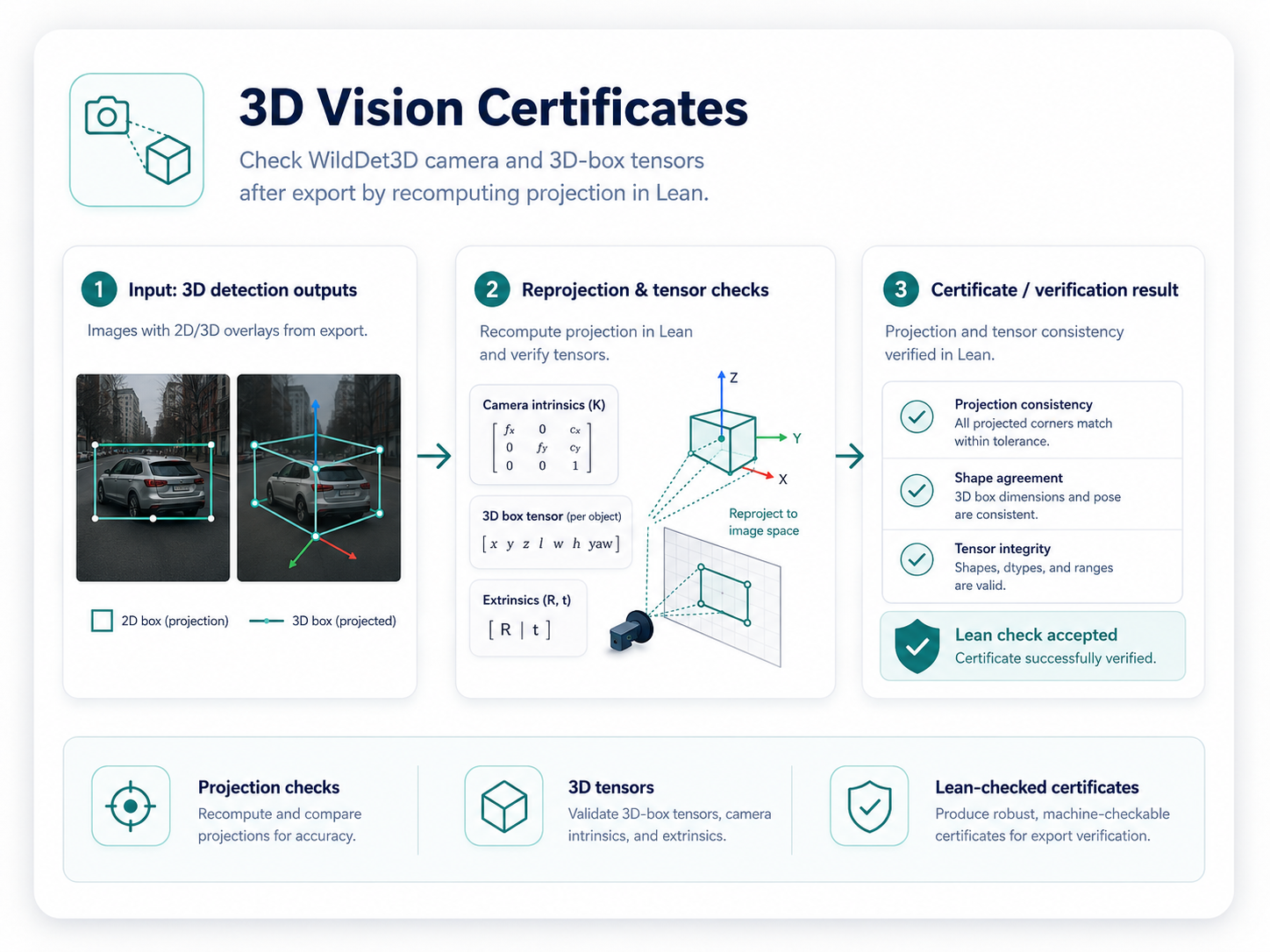
This example treats a 3D detector as an artifact producer. The detector/exporter emits a camera matrix, eight 3D box corners, image dimensions, and a claimed 2D box. TorchLean reloads that JSON, recomputes the projection in Lean, and checks whether the claimed box really encloses the projected corners.
The result is a small but useful certificate: not a proof that the detector is always correct, but a check that this exported geometry claim follows from the tensors in the artifact.
What This Checks
The checked claim is geometric:
camera_P : 3 x 4 projection matrix
corners3d : 8 x 3 cuboid corners
bbox2d : [xmin, ymin, xmax, ymax]
For each corner (x, y, z), the checker forms the homogeneous point [x, y, z, 1], multiplies by
the 3 x 4 camera matrix, divides image coordinates by projected depth, and compares the resulting
pixel (u, v) with both the image bounds and the claimed 2D box. The depth check matters: a point
behind the camera should not be accepted just because its divided coordinates look plausible.
Lean verifies that image dimensions are positive, the box is ordered and inside the image, all eight corners have positive projected depth, every projected corner is inside the image, and every projected corner is enclosed by the claimed 2D box.
The core artifact type is a tensor-shaped camera certificate:
structure BoxCameraCert (α : Type) where
width : α
height : α
tol : α
camera : CameraP α
corners : BoxCorners α
bbox : Box2D α
The executable checker is a Boolean function:
def checkCert (cert : BoxCameraCert α) : Bool :=
checkPositiveImageSize cert &&
checkBBoxOrdered cert &&
checkBBoxInsideImage cert &&
checkPositiveDepths cert &&
checkProjectedInImage cert &&
checkBBoxEnclosesProjection cert
And the theorem connects the executable checker to the theorem-facing contract. The page omits the standard arithmetic/typeclass parameters; the full theorem is in the 3D box verification API:
theorem checkCert_sound
{cert : BoxCameraCert α} (h : checkCert cert = true) :
Verified3DBox cert
This is the key pattern: the detector and exporter produce data; the Lean checker recomputes the geometric claim from that data.
Run The Real Model Path
The direct 3D detector route uses WildDet3D from Hugging Face. This path installs a real 3D detector stack, so it is best treated as an optional end-to-end example rather than a first runtime check.
python3 -m pip install -r scripts/verification/geometry3d/requirements-wilddet3d.txt
python3 -m pip install --no-deps utils3d
python3 scripts/verification/regenerate_assets.py --group geometry3d-wilddet3d --run
The command exports and checks:
lake exe verify -- camera-box3d-cert \
_external/geometry3d/wilddet3d/wilddet3d_cat_box3d_cert.json
It also renders PNG overlays under:
_external/geometry3d/wilddet3d/
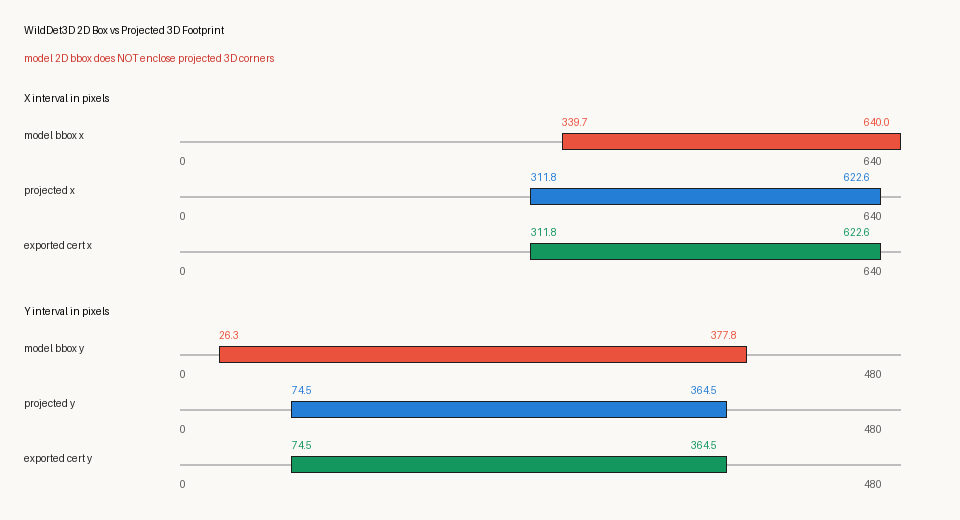
The accepted overlay uses the projected 3D footprint as the claimed box. The strict diagnostic overlay uses WildDet3D’s own 2D detection box. On the default example image, Lean rejects the strict claim because projected 3D corners fall outside that box.
What A JSON Artifact Looks Like
The concrete JSON is kept plain so it is easy to produce from any detector, not just WildDet3D.
{
"format": "torchlean.camera.box3d.v1",
"width": 640.0,
"height": 480.0,
"tol": 1.0,
"camera_P": [1.0, 0.0, 320.0, 0.0, 0.0, 1.0, 240.0, 0.0, 0.0, 0.0, 1.0, 0.0],
"corners3d": [0.0, 0.0, 8.0, 1.0, 0.0, 8.0, 1.0, 1.0, 8.0, 0.0, 1.0, 8.0,
0.0, 0.0, 10.0, 1.0, 0.0, 10.0, 1.0, 1.0, 10.0, 0.0, 1.0, 10.0],
"bbox2d": [319.0, 239.0, 321.0, 241.0]
}
For Cube R-CNN, Omni3D, or another detector, the workflow is the same: export K or P, image
size, corners, and a claimed box, then run the Lean checker.
python3 scripts/verification/geometry3d/export_omni3d_box3d_cert.py \
--prediction-json output/evaluation/predictions.json \
--out _external/geometry3d/omni3d_box3d_cert.json \
--verify
Negative Cases
The example also includes bad certificates motivated by real glue failures: swapped box layouts, negative depth, wrong projection matrix layout, and 2D boxes that do not enclose projected 3D corners.
python3 scripts/verification/regenerate_assets.py --group geometry3d-visual --run
Green overlays correspond to certificates accepted by Lean. Red overlays correspond to rejected certificates. The checker reads the exported camera and box tensors directly; the visualization is there to help a human see what happened.
The Bug Zoo wrapper re-exports the theorem under a tutorial-facing name:
theorem accepted_camera_box_certificate_is_verified
{cert : BoxCameraCert α}
(h : checkCert cert = true) :
Verified3DBox cert :=
checkCert_sound h
There is also an interval robustness theorem for perspective division. If homogeneous projection numerator/depth intervals divide into a pixel interval contained in the bbox, every concrete camera choice represented by those intervals stays inside the same bbox. Again, this is the readable shape of the statement; the full theorem includes the interval hypotheses.
theorem homogeneous_projection_uncertainty_stays_inside_bbox :
xmin cert ≤ uNum / z ∧
uNum / z ≤ xmax cert ∧
ymin cert ≤ vNum / z ∧
vNum / z ≤ ymax cert
Next, read the Bug Zoo walkthrough for the surrounding failure-mode catalog, or the Verification Bounds walkthrough for IBP and CROWN-style graph verification.